放棄昂貴的傳感器研究人員只用一個攝像頭讓卡丁車實現”自動駕駛”
自動駕駛汽車通常裝載昂貴的感測器陣列,如光達、雷達和高清攝影機。 但是,一位DIY 建造者已經證明,在某些封閉環境中可以放棄所有花哨的裝備,只用一個攝影機就能實現自動駕駛。
YouTuber 用戶奧斯汀布萊克(Austin Blake)就是這樣一個人,他家裡剛好有一輛自製的卡丁車。 在將其命名為”Crazy Cart”之後,他決定將其改裝成自己的自動駕駛測試平台。 為此,他首先設計了一條臨時賽道,用對比鮮明的膠帶標記,鋪在他工作室的地板上。 如下圖所示,空間非常狹小,但小車的轉彎半徑也很小。
接下來是最困難的部分–讓Crazy Cart 真正掌握自動駕駛技巧。 為此,布萊克透過訓練有素的神經網路模型,採用了一種名為行為複製的技術。 首先,他手動駕駛卡丁車在賽道上行駛時錄製了約15000 張圖像,並將每個點的轉向角度作為訓練標籤。 然後,他將這些數據輸入卷積神經網絡,該網絡學會將圖像輸入與相應的轉向方向聯繫起來。
要獲得一個性能良好的模型,需要經過大量的試驗和失誤。 最初的測試失敗了,因為網路難以分辨軌道邊緣和導航急轉彎。 Blake 嘗試了數據增強技巧、調整超參數、使用多個攝像頭,甚至添加廣角鏡頭來增強視野。
然而,真正的突破來自於他添加了亮藍色膠帶作為外邊界,以增加對比。有了明確的軌道,他的作品可以僅憑單眼視覺在地面軌道上自主滑行,而無需昂貴的感測器。
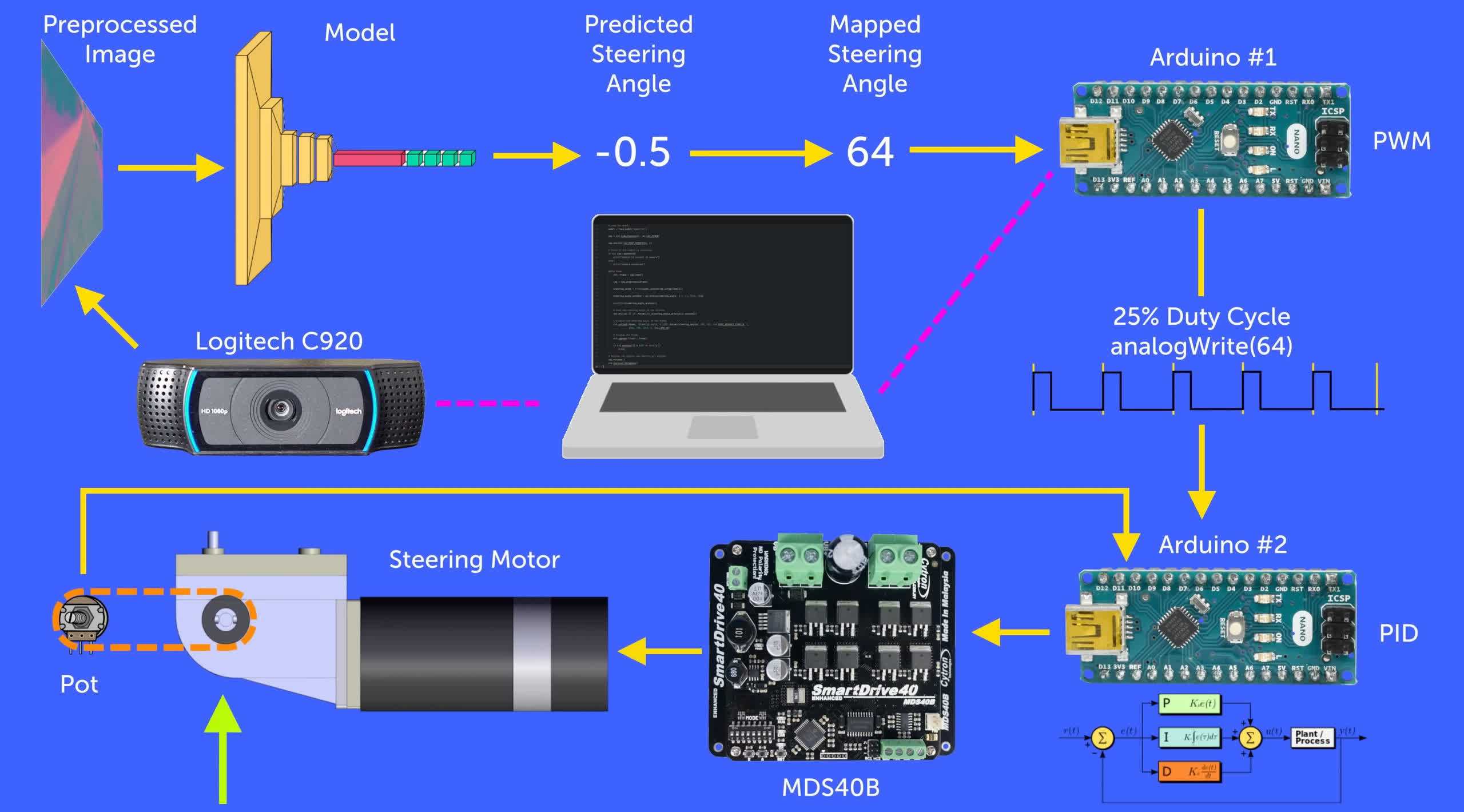
這台設備總共需要三個Arduinos。 一個Arduino 將電腦中的轉向預測訊息傳遞給第二個Arduino,後者將這些數據與位置回饋資訊結合起來,操作一個控制轉向角的馬達。 第三個Arduino 透過向卡丁車的速度控制器發送控制訊號來控製油門。

{kind=link}
當然,與在具有複雜性和不可預測性的真實公共道路上航行相比,這只是一個相當有限的使用案例。 布雷克坦言,後者是一項難度極大的挑戰,需要更豐富的感測器數據,而不僅僅是攝影機。
儘管如此,這個項目還是令人印象深刻,它展示了現代機器學習在從不起眼的視覺輸入中提煉駕駛智慧方面的能力。 擴展該項目可能需要更多的訓練數據,但一個人的能力有限。
